TR-CXGJ-1自動シングルヘッドサーボモーターキャッピングマシン
TR-CXGJ-1自動挿入キャッピングマシンは、ねじ込み機構、搬送機構、制御システムで構成されています。この機械のシンプルで調整可能な設計は、高い生産効率と高い汎用性を提供します。この装置はベルトまたはトラックコンベヤーラインと併用して使用する必要があります。コンベアベルトのベルトは摩擦係数の低い素材で作られていることが推奨されます。この機械は、ラウンドキャップ、ポンプキャップ、ガンキャップ(後者はガンヘッドで締め付けつつポンプヘッドを自由に回転させるカバーの一種)と組み合わせて使用に適しています。
適用ボトル
応用:
1.液体パーソナルケア製品:
使用方法:シャンプー、コンディショナー、ボディウォッシュ、ハンドソープ、洗剤、消毒剤など。
適用要件:機器は自動キャップによりキャップとボトルネック間の糸の密接を保証し、漏れを防ぎつつ高い清浄度の生産基準を満たします。
2. スキンケアと化粧品:
使用方法:セラム、ローション、クリーム、トナーなど。
申請要件:充填およびキャップ作業。一部の装置は窒素除去を組み込み、酸素を隔離し製品の保存期間を延ばしています。
3.特別なボトルとキャップの形状:
適用シナリオ:不規則な形状のボトル(例:四角形、円錐形)および複雑なキャップ(例:ポンプヘッド、スプレーノズル、子供抵抗キャップ)。
適用要件:手動介入を最小限に抑えるために、統合された「キャップ配置・キャップ取り付け・ネジ締め」操作を実現。
サンプル:

特徴:
1.高精度と安定性:この装置はサーボモーター駆動とトルク制御技術を採用し、各ボトルキャップの一貫性と信頼性の高いシールを確保します。特に高性能なシールが必要な製品に適しています。
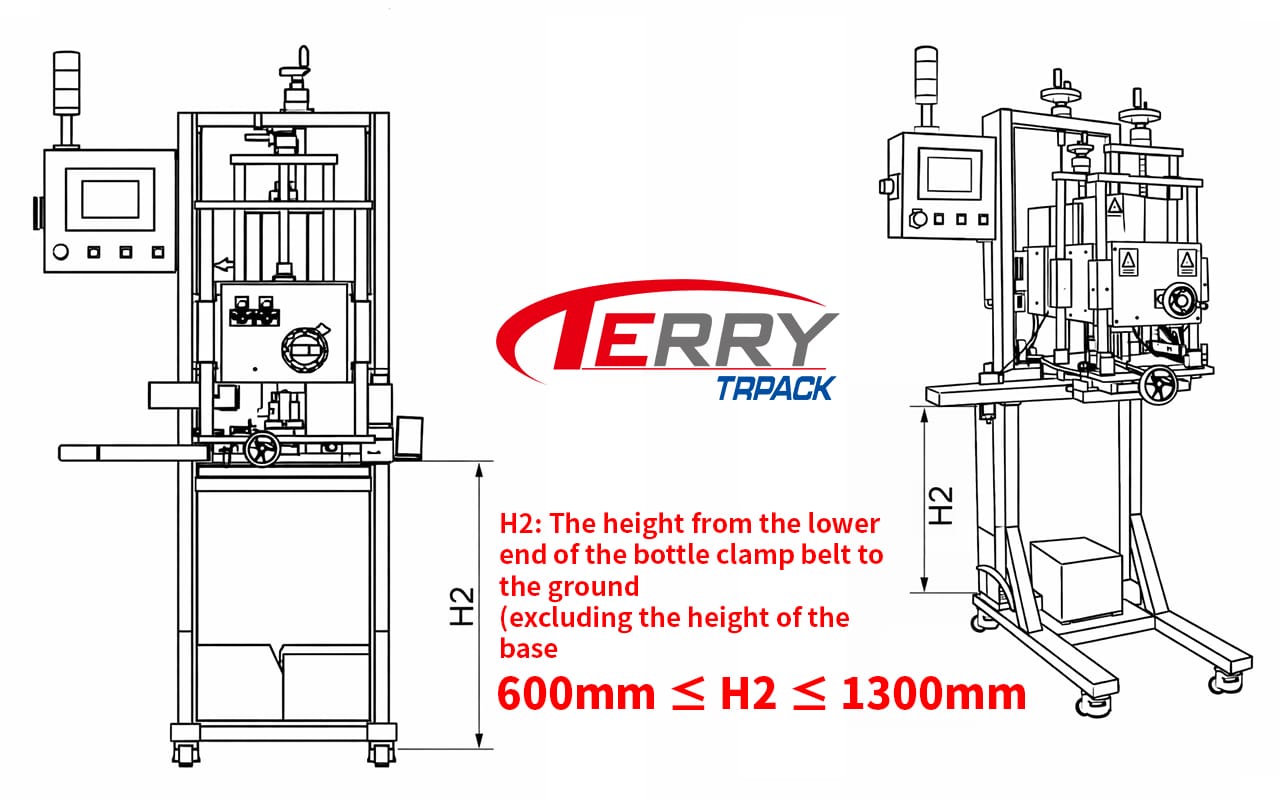
2.操作のしやすさと柔軟性:機器設計は実用性に重点を置いています。例えば、手動レバーとリフトスクリュー用のギアシステムで駆動する統合型リフティング調整機構が装備されており、異なるボトルキャップの高さに迅速に適応でき、手動調整時間を短縮できます。同時に、モジュール構造と可動ローラーにより設置、保守、移設がより便利になり、多様な生産環境に適しています。
3.適応性と多用途性:インサート型キャッピングマシンは、直径30ミリから80ミリメートルのさまざまなボトルキャップサイズに対応し、ガラスやプラスチックなど様々な容器素材に対応した可変クロータイプのクランプ機構を備えています。食品や化粧品業界で広く使われています。
4.効率性とコスト効率:手作業に代わる自動化作業により、密封速度が大幅に向上し(1時間あたり最大600本)、熟練労働者への依存が減少しました。正確なトルク制御により、製品の損失率(例:漏れや誤ったシール)が減少しました。これにより、労働力や資材の無駄が長期的に削減されます。
5.信頼性と保守性:完全密閉技術と耐摩耗部品(例えば円錐形ギアトランスミッション)を採用することで、部品の摩耗や故障率が低減され、機器の寿命が延びます。保守時には、気道の簡単な点検やトルクナットの調整だけで済み、複雑な工具は不要です。これにより、ダウンタイムとメンテナンスの難しさの両方が軽減されます。
仕様:
| キャッピングヘッド | 1 |
| 該当するボトルの種類 |
ボトル口径:Φ30mm - 100mm;ボトルショルダー高さ:60mm〜250mm カスタマイズ受け入れ |
| 適用される大容量タイプ |
キャップ直径:Φ30mm - 80mm;キャップ高さ:15mm-65mm お客様の包装素材に合わせてカスタマイズが可能です。 |
| 生産能力 | ≥ 60本/分 |
| 空中運用資源 |
0.6 ~0.8Mpa (乾式・洗浄の圧縮空気を使用。) |
| 電圧 | 交流220V;50/60Hz |
| トータルパワー | 3KW |
| 大気消費量 | 30 L/min |
| 全体の寸法 (メインマシン) |
650*1100*1900mm(L*W*H) |
| 総重量 | 180KG |
機能:
1. クランプベルトは一体成形のベルトで作られており、耐久性が高く、キャップをねじ込む際にボトルが揺れないようにします。

(1) クランプベルトはサーボモーターで駆動・制御されるため、よりスムーズな伝達を実現します。
(2) ベルトクランプは柔軟で耐摩耗性のある素材で作られており、ボトル本体を傷つけません。
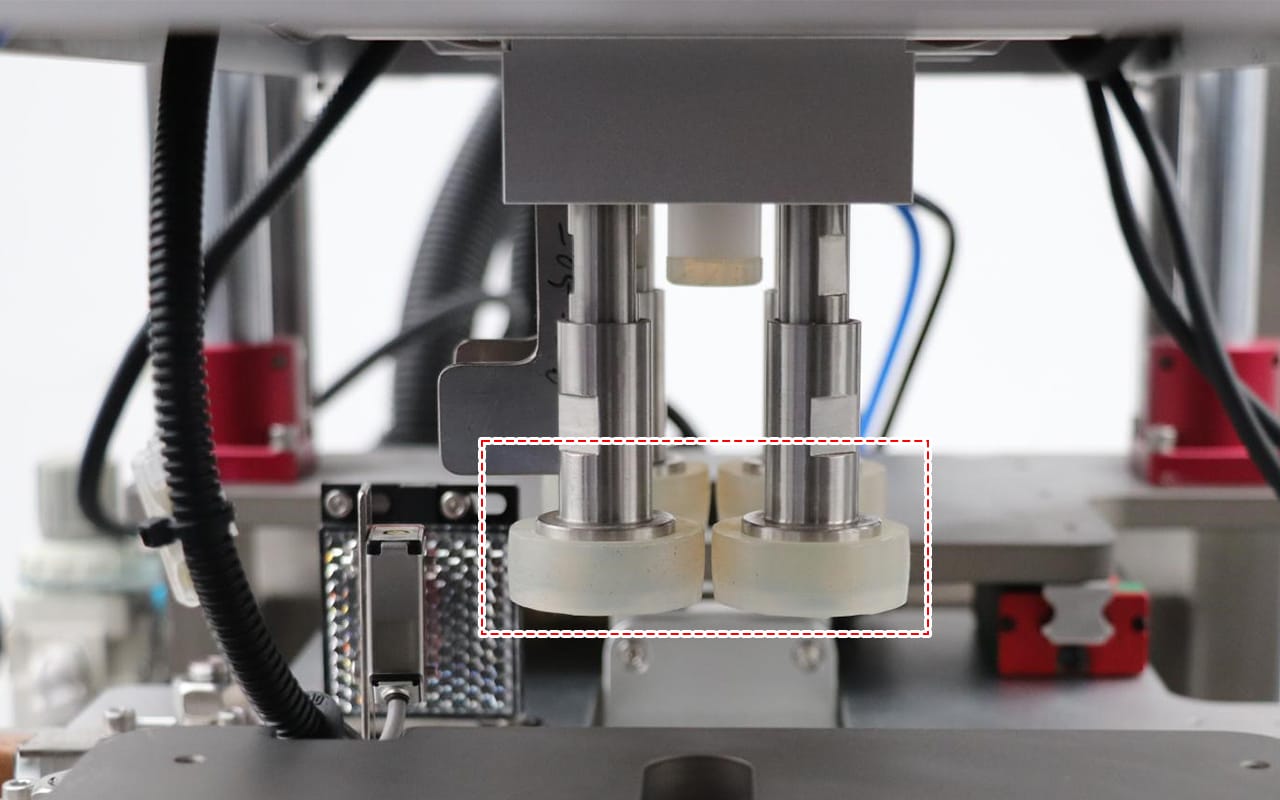
2. キャップが損傷しないようにするためのソフトシリコンキャッピングホイール。
3. キャッピング工程では、正確な伝達を行うサーボモーターが使用され、キャッピングトルクは調整可能です。
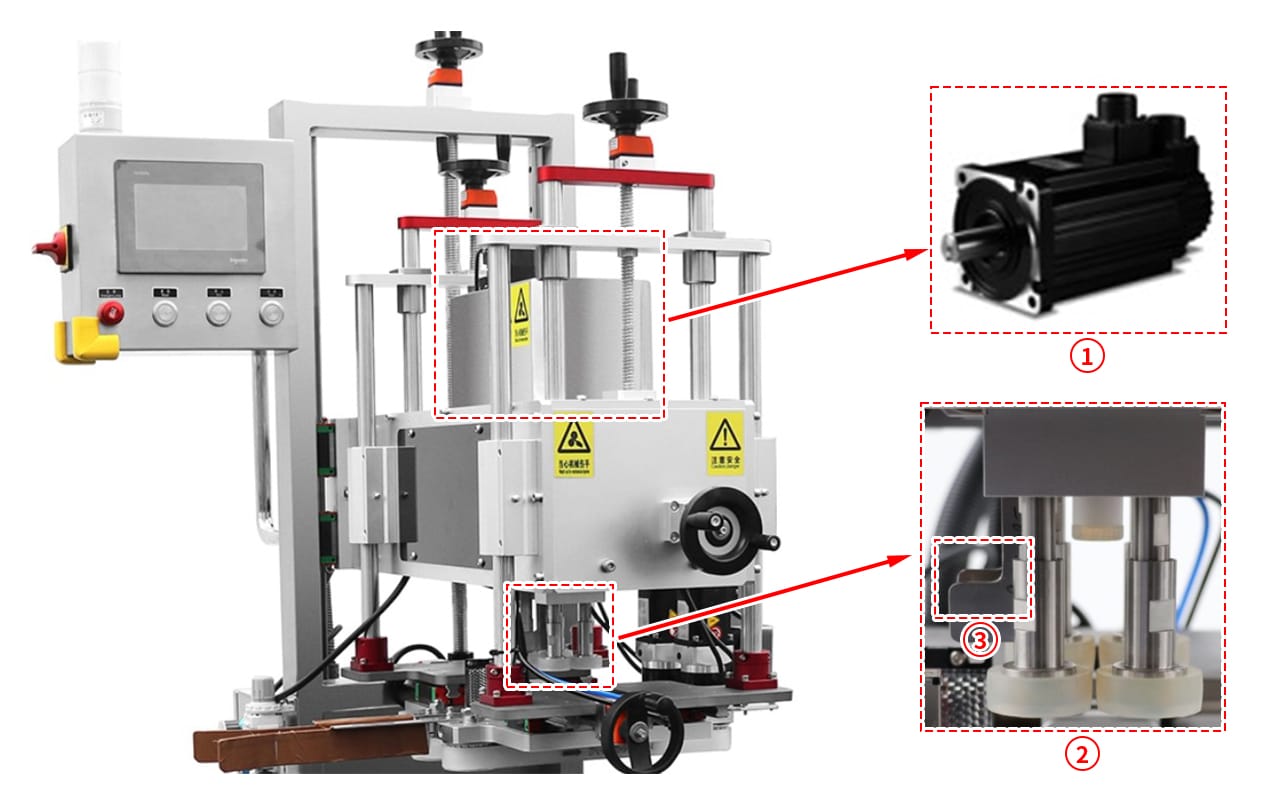
(1) サーボモーター(トルク調整可能)。
(2) キャップ装置
(3)固定ポンプノズル向き装置:排出ボトル中のポンプノズルの向きを一貫させます。
4. シリンダー制御固定ボトル法(シリコンクランプを用いて瓶表面の損傷を防ぎ)、光電検出による正確な位置特定。
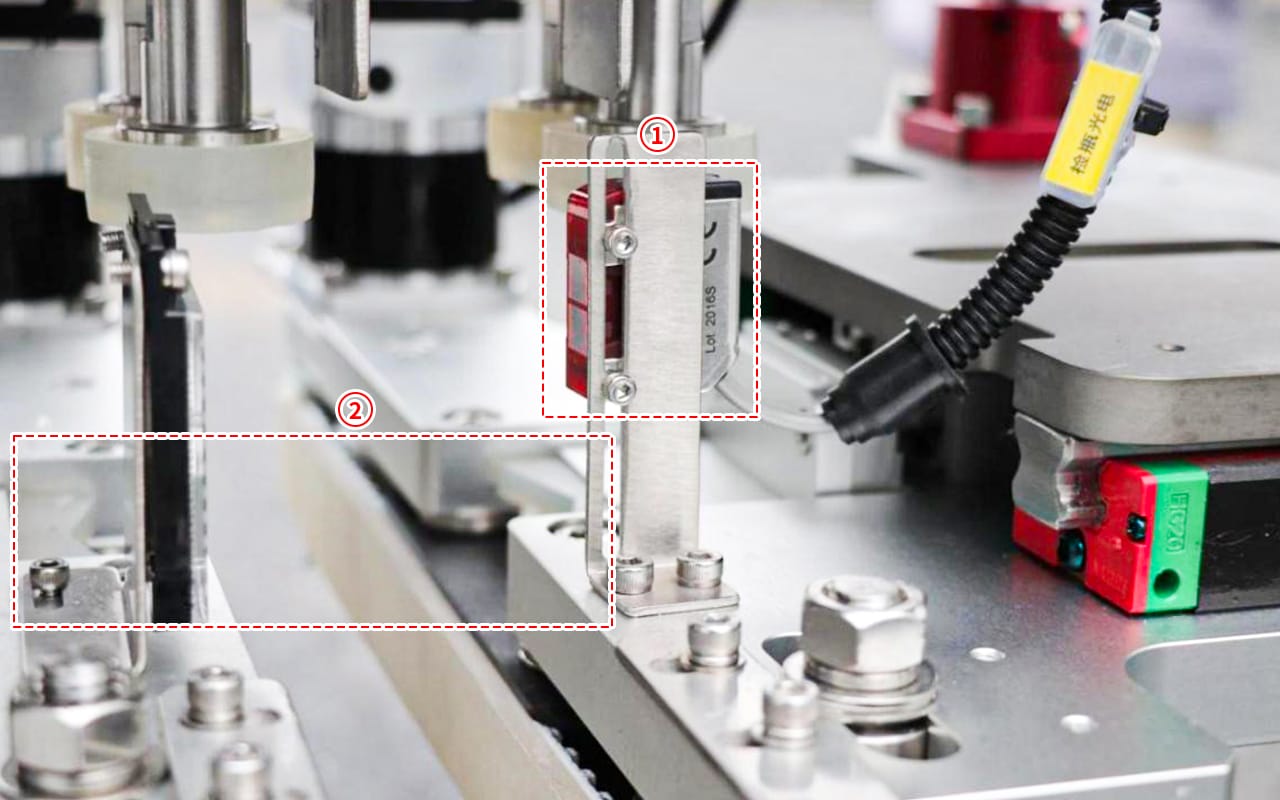
(1)検査ボトルの光電センサー。
(2) ボトルを検出した後、シリコーンクランプブロックがボトル表面を損傷することなく作動します。
5. シングルヘッドサーボモーターキャッピングマシンはインサート型設計を採用しており、軽量で便利です。