
TR-XG-5S 자동 서보 모터 통합 추적 캡 기계
TR-XG-5S 캡핑 머신은 TRPACK의 최신 통합 트래킹 서보 모터 캡핑 머신입니다. 이 장비는 전체적으로 통합된 서보 캡 고정 방식을 채택합니다. 수평 추적 모듈, 서보 캡 고정 메커니즘, 원형 캡 고정 메커니즘, 그리고 슈나이더 제어 시스템으로 구성되어 있습니다. 기계의 단순하고 조정이 쉬운 구조는 높은 생산 효율과 강력한 유연성을 제공합니다.
적용 가능한 병
적용 방법:
1. 액체 개인 위생 제품:
적용 방법: 샴푸, 컨디셔너, 바디워시, 손 비누, 세제, 소독제 등.
적용 요구사항: 장비는 자동 캡핑을 통해 캡과 병목 사이의 나사 접촉을 보장하여 누수를 방지하고 고청결 생산 기준을 충족합니다.
2. 스킨케어 및 화장품:
적용 방법: 세럼, 로션, 크림, 토너 등.
적용 요건: 채우기 및 캡 작업 일부 장비는 질소 정화를 통합하여 산소를 격리하고 제품 유통기한을 연장합니다.
3. 특수 병 및 캡 형태:
적용 시나리오: 불규칙한 모양의 병(예: 사각형, 원뿔형)과 복잡한 캡(예: 펌프 헤드, 분사 노즐, 어린이용 캡).
적용 요구사항: 수동 개입을 최소화하기 위해 통합된 '캡 장착-캡 부착-나사 조임' 작업을 구현합니다.
샘플:
특징:
1. 고정밀 및 안정성: 서보 모터 구동 장치는 나사 토크, 속도, 각도를 정밀하게 제어합니다. 일정한 토크 또는 펄스 토크 출력 모드를 지원하여 씰 파손이나 병뚜껑 손상을 효과적으로 방지합니다. 폐쇄 루프 제어 시스템은 실시간으로 매개변수를 조정하여 고속 운전 하에서도 공정의 일관성을 유지합니다.
2. 간편한 조작 및 효율적인 유지보수: 완전 터치스크린 PLC 제어와 인간-기계 인터페이스는 매개변수 설정을 단순화하고, 공식 저장 및 검색을 지원하며, 포장 사양 변경 시 캡 래칭 높이, 속도, 토크를 빠르게 조정할 수 있습니다; 모듈식 설계는 유지보수를 용이하게 하며, 서보 시스템은 기계적 마모와 손상을 줄이고, 가동 중단 시간을 단축시킵니다.
3. 생산 효율성 및 비용 최적화: 트래킹 설계는 캡 고정 헤드가 움직임을 동시에 추적하여 잠시 멈추지 않고 연속적으로 밀봉할 수 있게 하여 생산 라인 속도를 높입니다; 지능형 모니터링과 자동 거부 기능은 폐기량을 줄이고, 에너지 절약 설계는 에너지 소비를 낮춥니다.
4. 유연성과 적응성: 장비는 다양한 병 모양과 캡 모양에 호환될 수 있습니다. 매개변수를 조정하면 병 높이 110mm에서 250mm, 캡 직경 20mm에서 80mm와 같은 다양한 크기 범위를 커버할 수 있습니다; 서보 프로그래밍 기능은 생산 작업의 빠른 전환을 지원하여 다양한 종류와 소규모 배치의 요구를 충족합니다.
사양:
| 캡핑 헤드 | 1 |
| 적용 가능한 병 종류 |
병 입구 직경: Φ50mm - 120mm; 병 어깨 높이: 110mm-250mm 커스터마이징 수락 |
| 적용 가능한 캡 유형 |
캡 직경: Φ15mm - 40mm; 캡 높이: 15mm-65mm (펌프 노즐에서 캡 중심까지의 거리는 45mm≤.) 고객의 포장 재료에 대한 맞춤화 허용. |
| 생산 능력 |
≥ 분당 60병 (500ml 샴푸 제품 예시) *실제 생산 능력은 제품 크기, 포장재 특성, 충전 재료 특성 및 기타 요인에 따라 달라질 수 있습니다. |
| 항공 운용 자원 |
0.6 ~0.8Mpa (건조 및 청소 압축 공기를 사용하세요.) |
| 전압 | AC 380V; 50Hz |
| 총전력 | 10KW |
| 대기 소비 | 200 L/분 |
| 전체 치수 (메인 머신) |
2700*1500*2600mm (L*W*H) |
| 전체 무게 | 2500 KG |
기능:
1. 캡 급식 시스템:
원형이고 균등한 간격으로 배치된 직선 캡 컨베이어 트랙;
자동적이고 정밀한 캡 회수를 위한 기계식 그립기 5세트.
1.1 선형 캡 컨베이어 트랙: POM 유연한 컨베이어 체인을 사용하여 캡 걸림을 방지하고 병뚜껑 오염 없이 장기 사용을 보장합니다.
1.2 균등 분배 운반 병뚜껑 트랙: 회전식 캡 분배 시스템을 사용하며, 펌프 캡 간격을 조절할 수 있습니다.

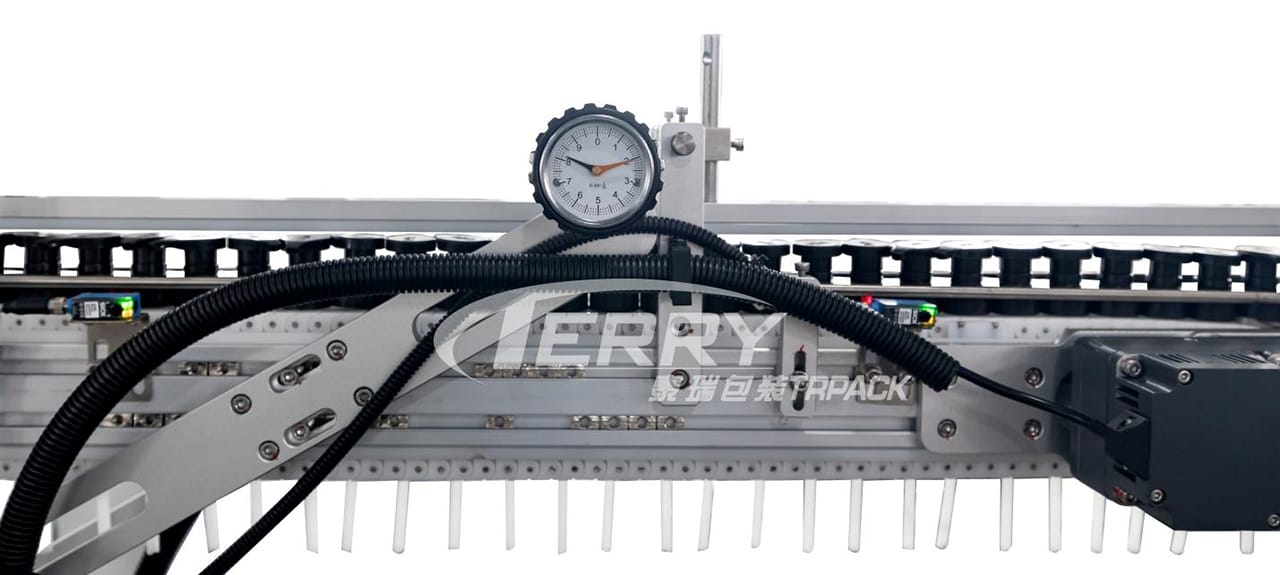
2. 병 분리 시스템: 클램핑 컨베이어 벨트를 이용해 병을 고르게 간격으로 배치하여 병이 온전하게 유지되도록 합니다.

2.1 캡 덮기 전 병 상태: 병은 단단히 포장되어 있습니다.
2.2 장치에 의한 병 분리 후 상태: 병 간 간격은 캡핑 헤드의 간격과 일치합니다.
3. 자동 캡 회수 시스템: 광전 센서가 병을 감지하면 로봇 발톱이 회전식 캡 분배 시스템에서 캡을 자동으로 회수합니다. 수평 전송 모듈은 병을 추적합니다.
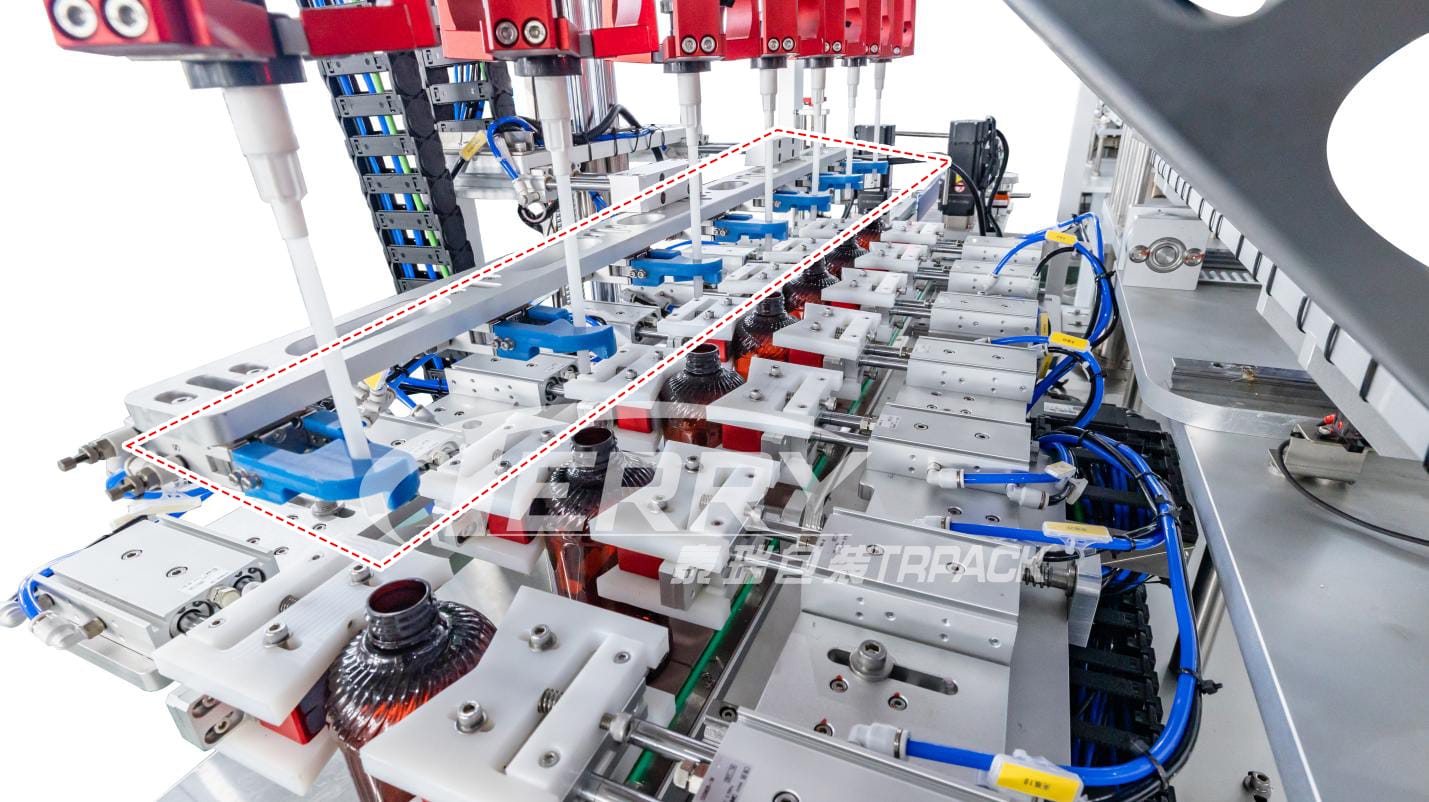
튜브 스트레이트 장치, 병에 제대로 된 펌프관 삽입을 보장합니다.
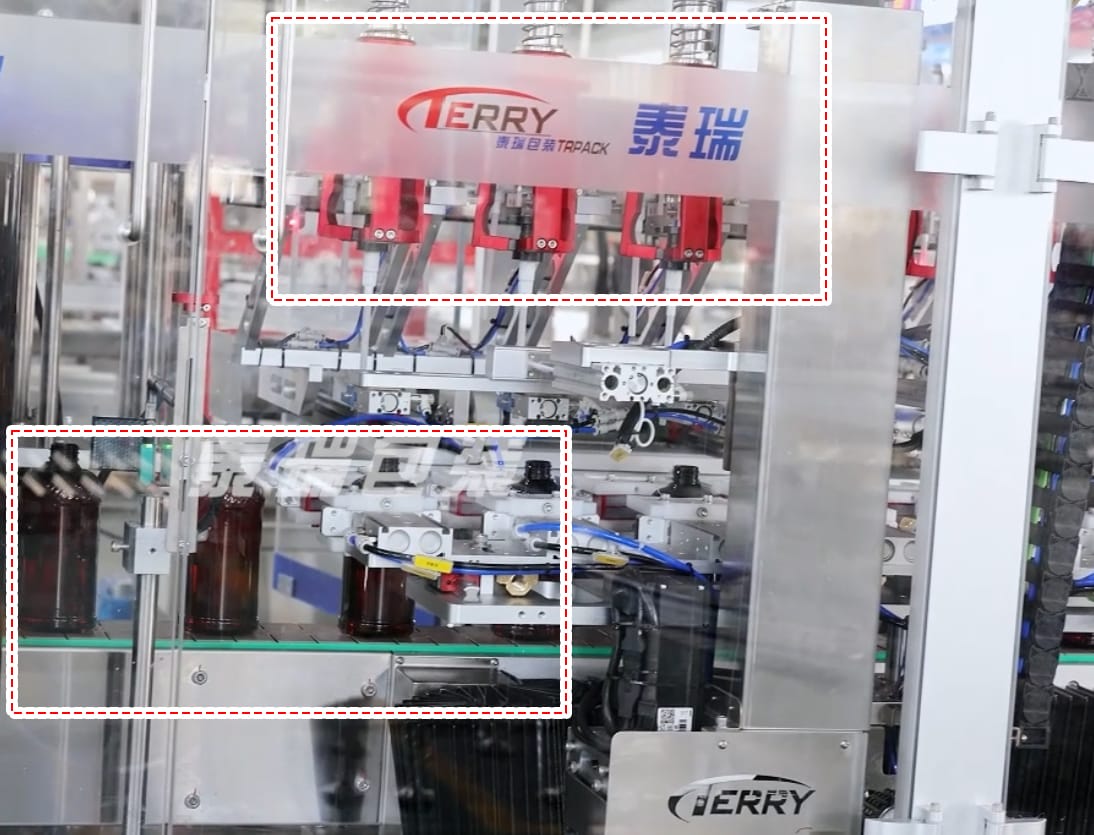
4. 자동 캡 시스템:

자동 캡 회수와 튜브 정렬 후, PLC는 병과 캡핑 그리퍼를 중앙에서 제어하여 동기화 지점으로 이동합니다. 캡핑 헤드가 내려가 캡을 씌우기 시작하며(병 고정 모듈이 캡 착용 시 병이 안정적으로 유지되도록 보장합니다). 캡핑 토크가 미리 설정된 값에 도달하면 캡핑 헤드가 자동으로 해제되어 원래 위치로 돌아가 다른 캡을 꺼내 다음 병을 캡으로 덮습니다.
5. 고토크 캡핑 용도에 적합한 서보 모터 제어가 가능한 실리콘 소프트 그립 캡핑 메커니즘. 캡 장착 시 캡이 손상되지 않도록 보장합니다(3발톱 캡핑 시스템 사용).

6. 전체 기계에는 캡핑 헤드를 위한 서보 제어를 포함한 여러 서보 시스템이 장착되어 있습니다.
